I entered the Student Robotics Competition with a team from my school. I lead the mechanical engineering side of the project, designing the robot fully on CAD and manufacturing it in-house using aluminium extrusion, 3D printer components and many custom 3D printed parts.
Visit the Student Robotics Website at https://studentrobotics.org/
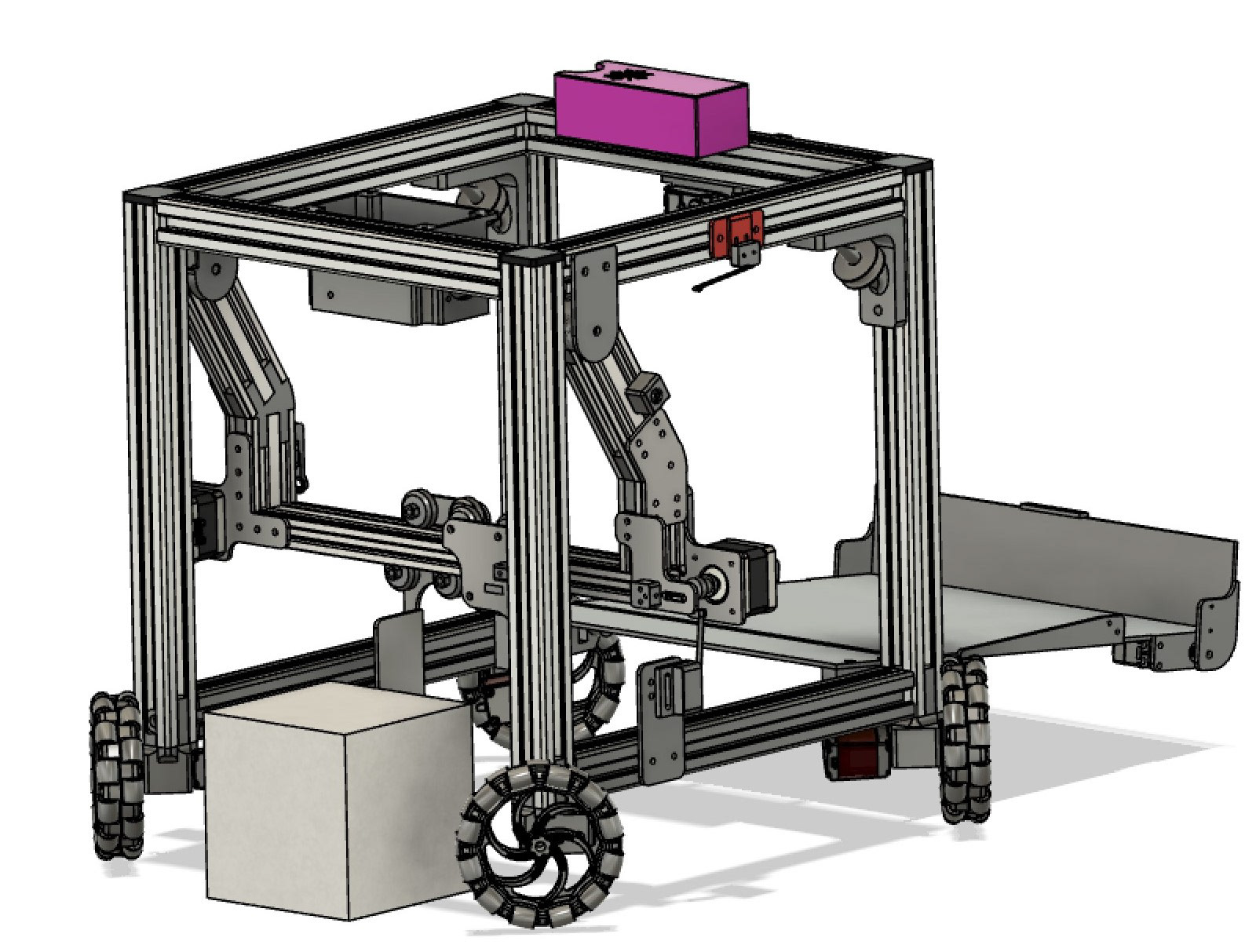
The robot's design was inspired by 3D printer machinery. The main body is similar to a CoreXY printer, and the swinging arm gantry inside is very similar to an Ender 3 x-axis gantry.
The whole of the main structure is made from aluminium extrusion, both 3030 T-Slot and 2040 V-Slot. Parts such as the wheel mounts, pulley brackets and electronics enclosures are 3D printed in PLA; and there are also Acrylic and Aluminium plates for the stepper motor mounts, switch plates and back tray.
The robot used the Raspberry Pi 4 and motor controllers supplied by Student Robotics, Vex servos and wheels for the drive system, and NEMA 17 stepper motors with A4988 drivers for the gripper control. For feedback, the arm used microswitches for the upper and lower limits;, and I made my own limit/calibration switches using the conductive parts of the grippers to home them and detect collisions.

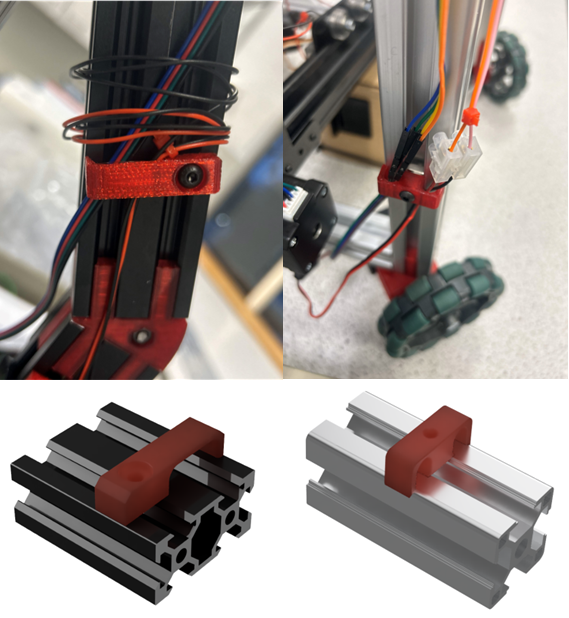
For this project I designed some cable clips for 3030 T-Slot and 2040 V-Slot that I published on my Thingiverse page to share with the other teams and anyone interested in using these aluminium extrusion systems. They are very quick and simple prints, that I designed not to need any supports; they attach with M4 screws and hammerhead nuts.